

本文深入探讨了最新单眼驾车技术的核心技术、应用现状、挑战和未来发展趋势。文章指出,深度学习算法在提高单眼驾车精度和可靠性方面发挥着关键作用,但单眼视觉感知的局限性仍需克服。未来单眼驾车技术需提升精度、可靠性、鲁棒性和适应性,并需要完善相关法律法规,以确保安全和广泛应用。单眼车道线检测和单眼视觉感知算法是未来研究的重点方向。
单眼视觉感知技术在最新单眼驾车中的应用
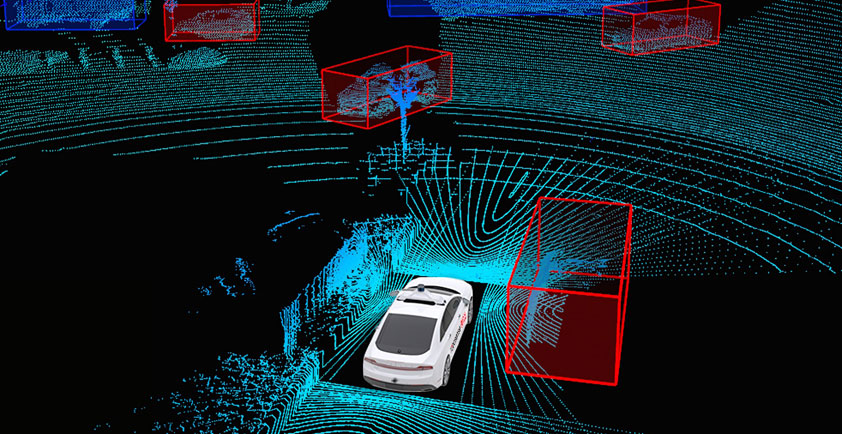
最新单眼驾车技术,核心在于单眼视觉感知技术的突破。不同于传统的双目视觉或激光雷达,单眼视觉系统仅依靠单个摄像头获取图像信息,并通过先进的算法进行图像处理和深度估计。这极大降低了系统的成本和复杂度,使其在自动驾驶领域具有极高的应用潜力。
近年来,深度学习技术的飞速发展为单眼视觉感知带来了新的机遇。卷积神经网络(CNN)等深度学习模型能够有效地从单张图像中提取丰富的特征信息,并进行精确的物体识别、目标检测和场景理解。例如,一些研究团队已经开发出基于CNN的单眼深度估计算法,能够在复杂的道路场景中实现较高的精度。
然而,单眼视觉感知技术也面临着一些挑战。单眼视觉系统难以准确地感知距离信息,容易受到光照变化、天气条件等环境因素的影响。此外,单眼视觉系统对计算资源的需求较高,需要强大的处理器才能进行实时处理。未来的研究重点在于如何提高单眼视觉感知的鲁棒性和效率,使其能够适应更加复杂的驾驶场景。

深度学习算法提升单眼驾车精度与可靠性
深度学习算法是最新单眼驾车技术取得突破的关键因素之一。通过大量数据的训练,深度学习模型能够学习到复杂的驾驶场景特征,并对图像进行精确的语义分割、目标检测和跟踪。这使得单眼驾车系统能够更准确地感知周围环境,并做出更可靠的驾驶决策。
例如,一些研究人员利用深度学习算法训练了单眼车道线检测模型,其精度已经接近甚至超越了传统的基于双目视觉的车道线检测模型。此外,深度学习算法还可以用于预测行人的运动轨迹,提高单眼驾车系统的安全性。
然而,深度学习算法也存在一些不足。深度学习模型的训练需要大量的标注数据,这增加了模型的开发成本和时间。此外,深度学习模型容易受到对抗样本的攻击,其鲁棒性还有待提高。未来的研究方向在于如何提高深度学习模型的泛化能力和鲁棒性,使其能够适应更加复杂的驾驶环境。
最新单眼驾车面临的挑战与风险
尽管单眼驾车技术发展迅速,但其仍然面临着许多挑战和风险。首先,单眼视觉感知的精度和可靠性仍然低于双目视觉或激光雷达,这可能会导致一些驾驶事故。其次,单眼驾车系统对计算资源的需求较高,这增加了系统的成本和功耗。
此外,单眼驾车技术还面临着一些伦理和法律问题。例如,如何保证单眼驾车系统的安全性和责任归属?如何避免单眼驾车系统被滥用?这些问题需要进一步研究和探讨。
从技术层面来看,单眼视觉系统在低光照、雨雪天气等恶劣环境下的性能显著下降,需要针对这些场景进行专门的算法优化。同时,如何有效地处理遮挡、模糊等复杂的图像情况,也是单眼视觉感知技术需要克服的难题。
单眼驾车技术的未来发展趋势
- 更高的精度和可靠性:未来单眼驾车技术将朝着更高的精度和可靠性方向发展,以减少驾驶事故的发生。
- 更低的成本和功耗:未来单眼驾车技术将朝着更低的成本和功耗方向发展,以提高其市场竞争力。
- 更强的鲁棒性和适应性:未来单眼驾车技术将朝着更强的鲁棒性和适应性方向发展,以适应更加复杂的驾驶场景。
- 更广泛的应用场景:未来单眼驾车技术将朝着更广泛的应用场景方向发展,例如自动泊车、无人配送等。
- 更完善的法律法规:未来需要建立更完善的法律法规,以规范单眼驾车技术的应用,保障驾驶安全。

 鄂ICP备15020274号-1
鄂ICP备15020274号-1